Bacterial flagellar propulsion represents an extraordinary system in nature for generating motion at the micrometer scale. Due to their unique molecular polymeric structure can adopt different shapes, depending on the local chemical and flow conditions. Their motion induces a local flow that can be used to propel cells, as well as much larger structures through a fluid environment. Our ongoing research program is to understand, to model and to exploit the physics of flagellar propulsion for use in engineered microfluidic systems. The objective of the program is to understand the fundamental scientific principles that govern the assembly and operation of flagella-propelled devices (both single swimmers and collectively-powered devices), as well as to demonstrate the enabling technologies necessary to fabricate microscale engineered propulsion systems. To address the challenges in swimming at low Reynolds numbers, a variety of robotic microswimmers have been fabricated and successfully controlled. Three dimensional Helmholtz coils are used for precise control of microswimmers. By setting our goal on biomedical applications such as targeted and localized drug delivery, we maintain paramount investigations in the field of swimming in complex media.
There is an urgent need for controllable miniaturized actuators to accomplish microscale biomedical tasks that are currently unachievable with presently available technologies. The emerging field of microrobotics has vast potential in many medically relevant applications, such as cell therapy, drug delivery, and minimally invasive medical procedures. Focused on the goal of in vivo use, we have recently developed wirelessly controlled, magnetically actuated, robotic microswimmers, and have displayed their ability to navigate in Newtonian fluids. We further develop a novel strategy to investigate the ability of our biologically-inspired robotic microswimmers to perform tasks both in vitro and in vivo. Currently, the use of microrobots for in vivo applications is limited due to the lack of understanding in the controllability of robotic microswimmers within in vivo environments, namely the non-linear viscoelasticity of biological fluids. The main challenges are navigation with uncertainties from stochastic environmental factors such as unstable flow, Brownian motion, navigation in three dimensional spaces, and control of a large number of microswimmers as a viable workforce. Our ongoing research is based on untethered magnetic microswimmers that are propelled through the environment by a rotational magnetic field. To take advantage of large uncertainties from in vivo environments that have complex heterogeneous microstructures, we deploy multiple microswimmers simultaneously; in doing so, we can ensure a sufficient number of microswimmers reaching the target location to perform their intended functions. Specially, this will be beneficial for particulate drug delivery system to manage drug concentration and sustained release within bodily fluidic environments.
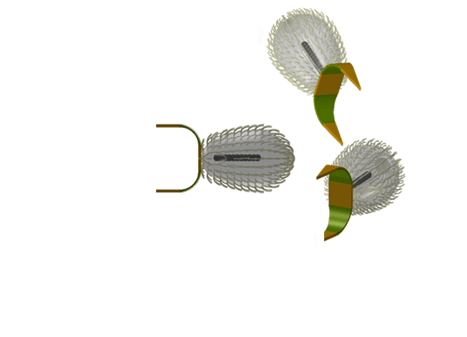
Propulsion at the microscale has been a subject that has long interested scientists and engineers over the last several decades. The swimming characteristics of microorganisms, such as Escherichia coli and Salmonella typhimurium, have been investigated within a multitude of different fluidic environments; however, the characteristics of robotic microswimmers in such media has only just recently attracted interest. Microswimmers are required to maintain a certain level of asymmetry or flexibility to swim on the microscale and satisfy the Purcell’s scallop theorem, which specifies that a propelling microswimmer will require the breaking of symmetries through time irreversible strokes. While the scallop theorem holds in Newtonian fluids, it is not so in the case of non-Newtonian fluids, where a symmetric 3D-printed scallop was recently demonstrated to swim within a shear thinning fluid. Similarly, a rotating dumbbell-like microswimmer composed of two unequal spheres was theoretically demonstrated to swim through a non-Newtonian (viscoelastic) fluid. The role of symmetry and its effect on propulsion of microswimmers within different fluids is worth exploring systematically, as is developing alternative motion gaits that microswimmers can utilize. In collaboration with Prof. Alex Leshansky at Technion and Prof. U Kei Cheang at SUSTECH, our ongoing project is to investigate the swimming behavior of highly symmetric planar microswimmers, in various fluidic environments, and to explore alternative propulsion gaits through specialized surface functionalization, both theoretically and experimentally. The planar (V- and L-shape) microswimmers are fabricated using photolithography then coated with a magnetic layer, allowing for external actuation via rotating magnetic fields. The central angle and the lengths of the two “wings” of the planar microswimmers are varied during fabrication in order to tune their hydrodynamic mobility. Likewise, the magnetization orientation can be tuned by varying the distribution of the coatings along the surface of the microswimmers, in order to manipulate their symmetries affecting their propulsion.
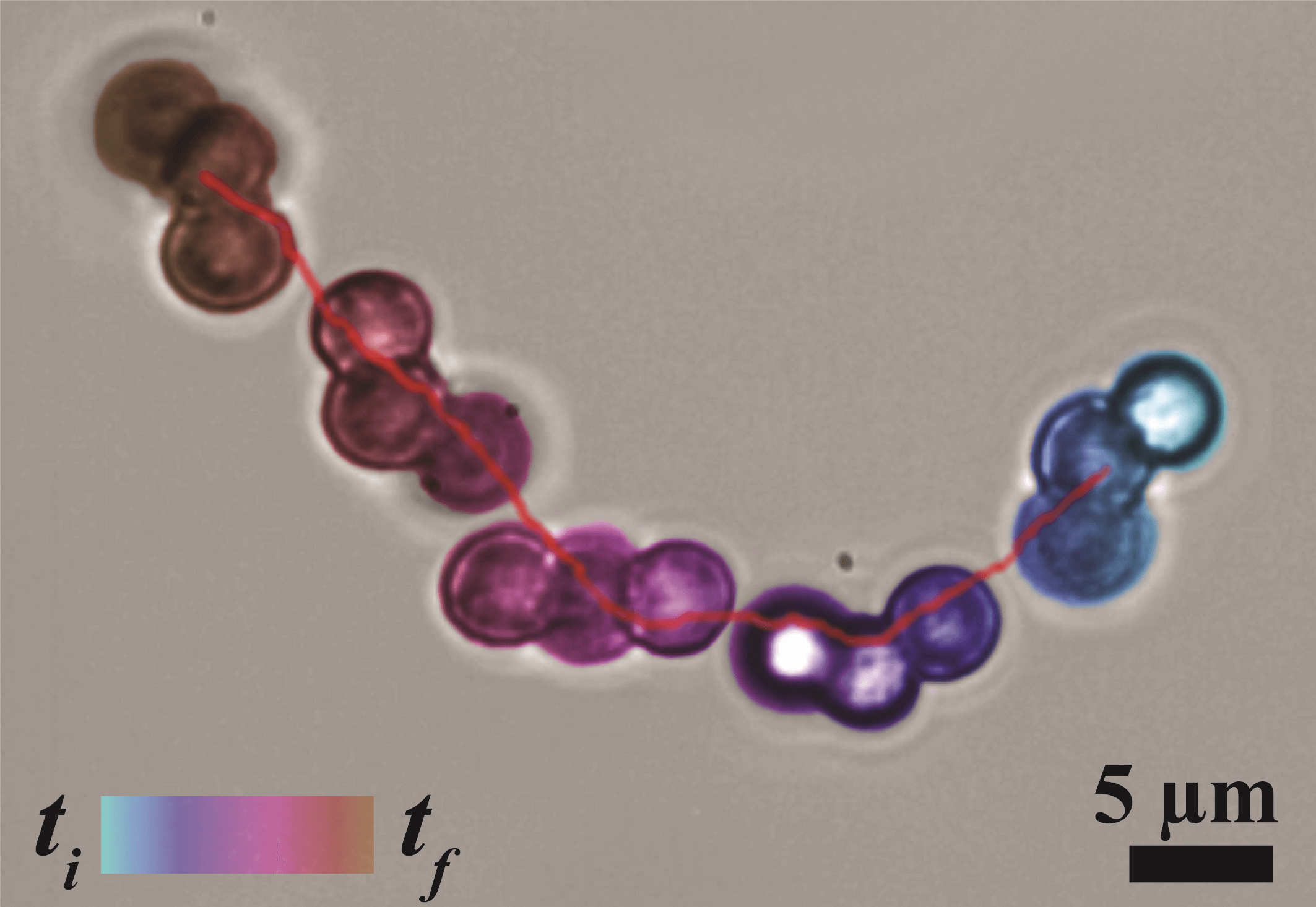
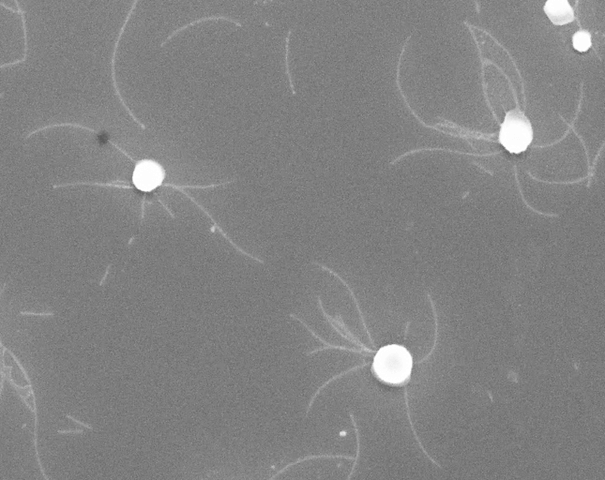
Many microorganisms swim through complex biomaterials such as mucus and tissues during reproduction and disease or soils or polymer exudates in the terrestrial and oceanic environments. The interaction between microbes and biomaterials thus affects health, ecology, and the environment. Because the scale of microstructural features in such media can be similar to the size of microbes, microbial transport through these biomaterials is affected by their interactions with the microstructure. While this interaction has most commonly been considered in terms of hydrodynamics and microscale mechanical deformation, “contact” interfacial interactions (including van der Waals, electrostatic screening, and chemical binding) may be as or more important. The net macroscale transport through biomaterials depends on swimming speeds and adhesion lifetimes mediated by all these micro- and nanoscale interactions. For example, depending on the number of adhesions to their surroundings, spirochetes display a number of qualitatively types of movement; the completely unadhered spirochetes are able to move the farthest by swimming. Notably, in typical bacterial models it can be difficult to disentangle the influence of these different physical forces, since contact interaction properties of live cells can be difficult to control experimentally. Thus, there is a need for model systems in which the effect of these interactions can be separately and controllably interrogated to determine their relative importance. Without the ability to separately understand each of these interactions, efforts to understand and model swimming through realistic biomaterials will be significantly hampered. Our ongoing research in collaboration with Prof. Henry Fu at the University of Utah is to address this need by studying live bacteria and artificial flagellar motors in mimetic mucus. The artificial models allow us to control micro- and macroscale mechanics as well as contact forces and clarify the relative importance of hydrodynamic, close-range, and nanoscale contact interactions for microbial transport through various types of biological media. Live bacteria will establish biological relevance.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}