Nano- and microscale robotic systems offer the possibilities for many applications including in in situ sensing, drug delivery, and minimally invasive surgery. To overcome challenges of low Reynolds number dynamics in viscous and viscoelastic fluids, we work at the interface between fluid mechanics and robotics to create biologically-inspired robots at small-scale.
There is an urgent need for miniaturized actuators, and their control schemes, capable of accomplishing microscale robotic assembly. Due to the difficulty in fabricating nanoscale motors and developing microscale power sources, actuation and control are two significant challenges in micro-scale robotics. This project seeks to combine microscale cell-like actuators, termed artificial cells, and novel swarm control algorithms for micro patterning. Specifically, this project is using artificial cell actuators, encapsulating targeted materials, which can be organized into complex configurations using only global control signals. The goal of this project is to develop a new type manufacturing by combining soft robotics and swarm control to construct assemblies (e.g. living cells, inorganic particles) in 2D and 3D. Their approach in using artificial cells, constructed using polysaccharide based hydrogels, to ferry desired components constitutes a novel direction in microrobotics. Currently, researchers have explored using engineered structures (e.g. µ-grippers) and live cells (e.g. bacterial micro-swimmers) as micro-scale actuators to push or pull desired objects into place. The approach seeks to use the soft robots themselves as building blocks for desired patterns. Their microrobotic artificial cells excel in encapsulating a wide range of micro and nano-sized particles, for example living cells and magnetic nanoparticles. Furthermore, artificial cells can efficiently release their payloads using external stimuli (e.g. optical). This microrobotic system is complemented with novel swarm control algorithms using obstacle-based particle computations. In traditional robotics, simultaneous control of multiple robots is based on individual motion control that requires heterogeneity among robots or the ability to deliver multiple input signals; both approaches are currently impractical for use in small scale systems. However, these challenges in micro- and nanorobotics, where a global field is used to control many small, relatively-homogenous agents, can be overcome though the use of parallel motion planning in obstacle-filled workspaces. This obstacle-based positional control makes the position of microrobots fully controllable using just a single control input. Actuation of our stimuli-responsive artificial cells in micro-fluidic obstacle-laden environments presents a paradigm shift in fabrication technology.
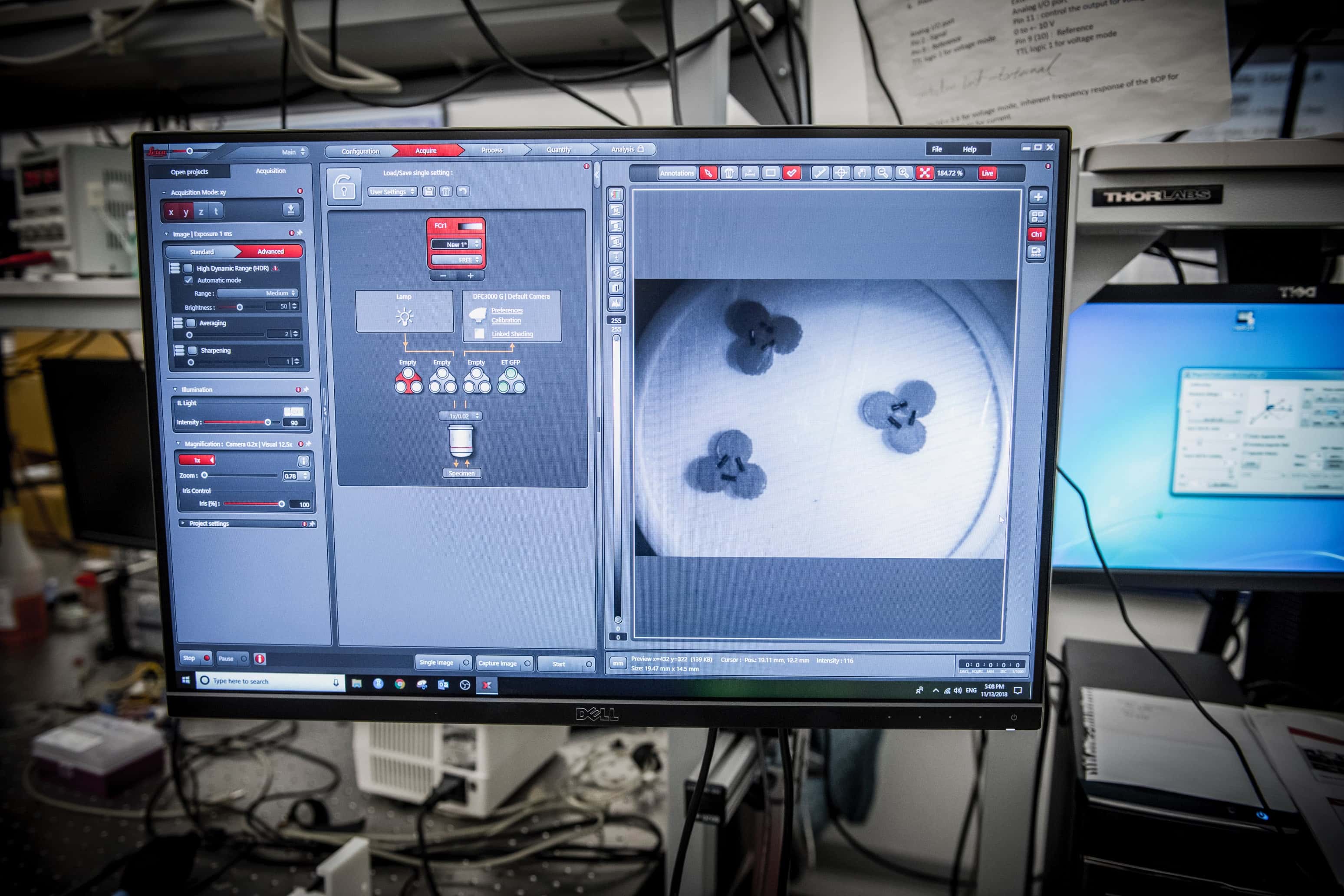
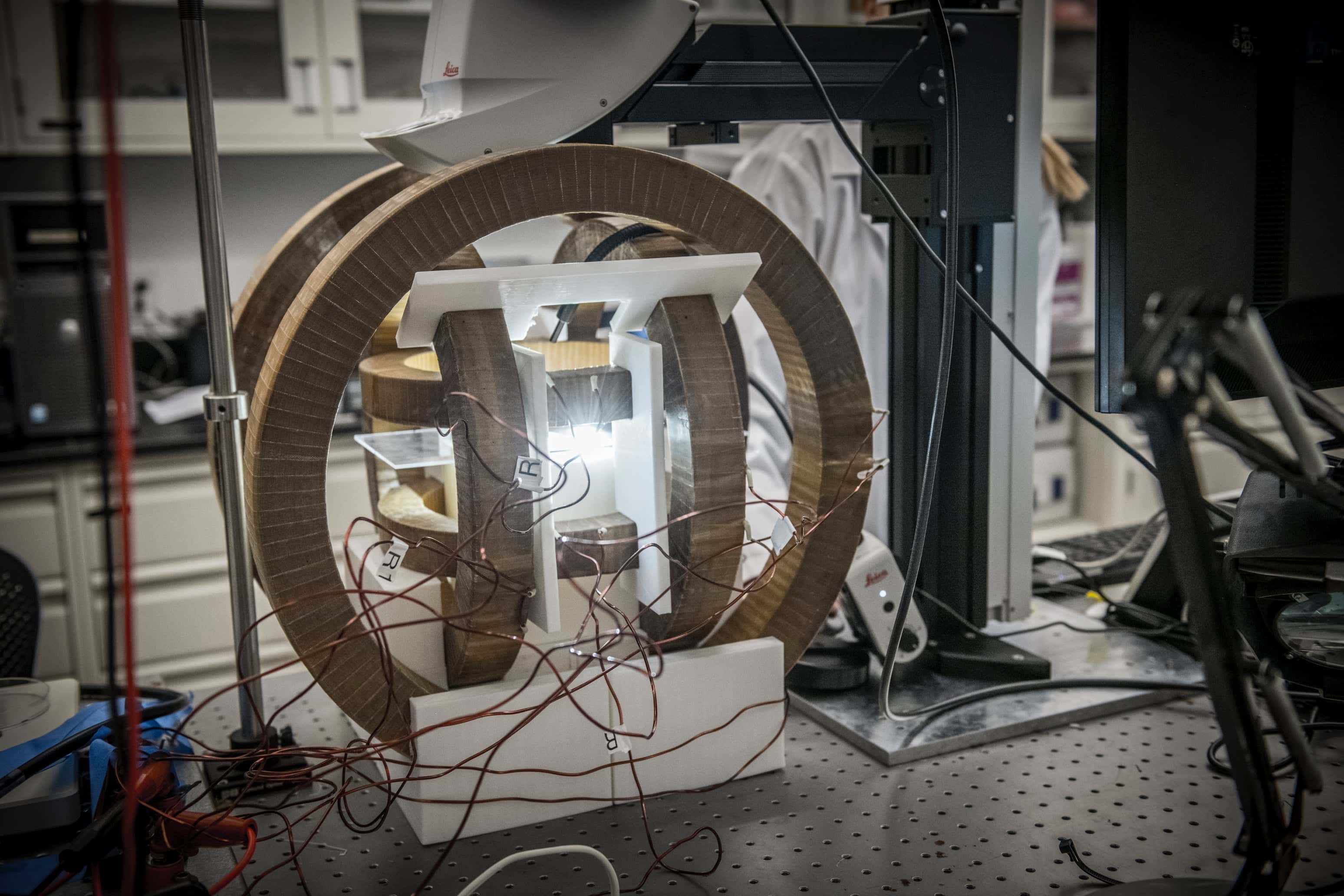
Further innovations in small-scale manufacturing will demand smarter techniques to enable the rapid production of commercially viable products. Existing manufacturing methods like additive manufacturing are not feasible for producing complex small-scale multi-component assemblies, thus there is an urgent need for new manufacturing methods which can create small complex structures using modular subunits. In collaboration with Prof. Aaron Becker at the University of Houston, this project is to develop an innovative reconfigurable modular robotic system which utilizes actuatable subcomponents that can be actively assembled or disassembled on command. This type of system could potentially improve the robustness and controllability of small-scale manufacturing. The modular subunits contain permanent magnets and can be of different geometrical shapes (triangular or hexagonal prism, cube, etc.). The modular subunits are actuated using external magnetic fields generated via a three-axis Helmholtz coil system and can achieve different motion patterns such as pivot walking or rolling. These motion modes evolve dynamically as subunits assemble into complex modular structures. The issues addressed by this project are at the interface of small-scale robotics, control theory, design and manufacturing, and materials science, and hold exciting prospects for fundamental research with the potential for diverse applications.
This project seeks to design and develop flexible modular soft-robots that possess different motion modes, deform and reconfigure through self-assembly/disassembly, perform swarm-guided object manipulation, and react to environmental stimuli. Artificial cells based on the shapes of bacterial bacillus and spirochetes are produced from polymeric gels; these gels allow for encapsulation of polydiacetylene (PDA) vesicles, gold and silver nanorods, and paramagnetic disks. Magnetic and optical stimuli are used to actuate the artificial cells to perform distinctive motion modes including: walking, slithering, rolling, wiggling, tapping and galloping. Within the polymeric body, gold and silver nanorods along with PDA vesicles allow for localized heating and deformation through surface plasmonic resonance (SPR). Both ultraviolet (UV) and near infrared (IR) lasers in combination with digital light processing (DLP) systems are used to perform localized heating with PDA vesicle acting as a detector. Computational studies are performed to determine the deformability characteristics of the artificial cells along with experiments to seal crevices and maneuver through confined spaces. Artificial cells are tested for individual controllability, swarm control, and guided object manipulation through modularity. The major outcomes of this research program will be the design and implementation of scalable, deformable, wireless, and modular bio-inspired soft-robots that possess different motion modes and are capable of sensing changes to different environmental stimuli. We will provide the direction for future development and implementation of modular soft-robots to manipulate them in complex bio-environments.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}